1.2控制系统应用举例
随着计算机技术的发展和新材料的开发,控制系统的应用范围获得了极大的扩展。这些材料可用于开发高效的执行器和传感器,从而减少了对能源的浪费和环境的影响。这些先进的执行器和传感器几乎可以被应用到任何系统中,包括生物推进、运动、机器人、材料处理、生物医学、外科和内窥镜、航空、海洋、国防和航天工业。
下面介绍一些我们日常生活中常见的控制系统。
1.2.1 智能交通系统
汽车及其在过去两个世纪的演变可以说是人类最具有变革性的发明。多年来,许多创新使得汽车更快、更安全、更美观。人们总是希望汽车的智能化程度不断提高,而且能够提供最大程度的舒适、安全和低油耗。汽车智能系统包括空调控制系统、巡航控制系统、防死锁刹车系统(ABS)、用于在粗糙地面上减少震动的主动悬挂、高过载弯道平衡气垫、当汽车转向不足或过高时提供偏移控制的动力系统(通过有选择地启动刹车以重新获得车辆控制)、防车轮加速时抓地不牢的牵引系统、控制车辆侧倾的主动转向杆等。以下是几个例子。
线控驱动和驾驶辅助系统
新一代的智能汽车能够了解驾驶环境、定位所在位置、监控汽车健康状态、理解道路标志、监控驾驶员的表现,甚至超越驾驶员以避免事故的发生。要实现上述功能需要对现有控制系统进行大修。线控技术把传统的机械和液压系统替换为电子设备和控制系统,使用机电执行器和人机接口(或者称为触觉系统),如踏板和转向模拟器。因此,传统的一些汽车元件,如驾驶杆、中间轴、泵、软管、流体、带、冷却器、制动助力器和主汽缸等。触觉界面可以为驾驶员提供足够的透明度,同时保持系统的安全性和稳定性。卸下笨重的机械方向盘和转向系统的其余部分在现代汽车重量的减轻和安全性方面具有明显的优势,并且由于给驾驶员创造了更大的空间而在人体工程学方面也有改善。在这方面,用驾驶员通过触觉控制的触觉装置来替换方向盘是有益的。触觉装置可以让驾驶员产生与机械方向盘相同的感觉,但是由于去除了大体积的机械系统,可以改善成本,提高安全性,同时减少燃料的消耗。
驾驶辅助系统通过感知、检测危险的性质和程度来帮助驾驶员避免或减轻事故。根据威胁的重要性和时间,车载安全系统将会尽早提醒司机即将到来的危险,并积极协助或最终进行干预,以避免事故或减轻其后果。当驾驶员由于疲劳驾驶或者是注意力不集中导致车辆失控时,辅助系统自动替代功能将是系统中的重要组成部分。在这种系统中,被称为先进车辆控制系统的装置对车辆控制进行纵向和横向的监控,并且通过与中央控制单元的交互,在被需要时可以随时对车辆进行控制。该系统可以方便地与传感器网络集成在一-起,监控道路上的各个环节,并准备以安全的方式采取适当的行动。
高级混合动力总成技术的综合应用
混合动力技术可以提高燃油的效率,同时增强驾驶体验。把新能源存储和转换技术与动力总成相结合,是混合动力技术的主要目标。这些技术必须与内燃机平台兼容,并且必须增强而不是危及车辆的功能。应用的示例包括插电式混合动力技术,其单独使用电池供电来增加车辆的巡航距离,并且利用燃料电池、能量收集(例如,通过将悬架中的振动能量或者是制动器中的能量转换为电能)或可持续能源(如太阳能和风力发电)为电池充电。智能的插电式车辆可以作为未来集成智能家居和电网能源系统的一部分,其将利用智能电能计量装置预测峰值能耗小时数,来最大限度地利用电网能源。
高性能实时控制,健康监测和诊断
现代车辆使用越来越多的传感器、执行器和网络嵌入式计算机。随着驱动系统等革 命性功能的引入,现代车辆对高性能计算的需求将会增加。将感官数据处理为适当的控 制、监测以及诊断信息所需要的巨大的计算负担为嵌入式计算技术的设计带来了挑战。 为此,与之对应的挑战是如何利用复杂的计算技术来控制、监控和诊断复杂的汽车系 统,同时满足低功耗和成本效益等要求。
1.2.2 汽车转向控制
其为图1-1所示为控制系统的简单例子,考虑汽车转向系统。被控变量或输出$y$是两个前轮的方向;激励信号或输入$u$为方向盘的方向。转向机构和整车动力系统组成了这样的控制系统或者类似的过程。如果控制汽车的速度是目的,那么施加在加速器上的压力就是激励信号,车辆速度就是被控变量。总体来说,可以认为简化的汽车控制系统有两个输入(方向盘和加速器)和两个输出(方向和速度)。这里的两个控制量和两个输出量是互相独立的,但是有些系统中的控制量之间是相互关联的。具有超过一个输人和一个输出的系统被称为多变量系统。
1.2.3 汽车怠速控制
以汽车发动机的怠速控制为例,这个控制系统的目标是: 在发动机上施加诸如传动、电力辅助转向、空调等负载的情况下,维持发动机以较低的速度空转,以降低损耗。如果没有怠速控制,任何突加于发动机的负载都会造成发动机速度陡降,甚至导致发动机熄火。因此,怠速控制系统的主要目的在于:在发动机上施加负载时,消除或尽量减少转速下降;使发动机怠速稳定在期望值上。图1-2是怠速控制系统框图。这里节气阀调节角 $\alpha$ 和负载转矩 $T_L$,(使用空调、电力辅助、转向或电L力制动产生的转矩)是输人,发动机转速 $\omega$ 是输出,发动机则是被控过程或系统。
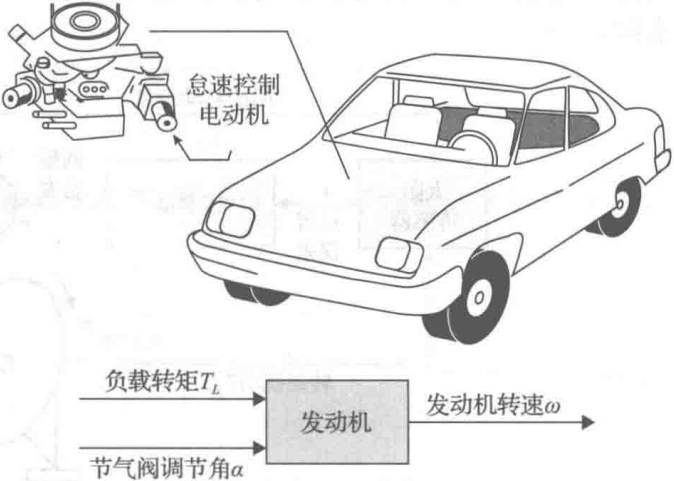 $$
图1-2息速控制系统控制框图
$$
$$
图1-2息速控制系统控制框图
$$
1.2.4 太阳能收集器的太阳跟踪控制
为了发展经济可行的非石油源电能,人们在替代能源的开发方面已经进行了大量的研究,其包括太阳能转换方法和太阳能电池转换技术。大部分此类系统使用了太阳跟踪装置。图1-3展示了一个太阳能收集器阵列,图1-4是一个使用太阳能的高效抽水机的概念图。白天太阳能收集器产生电能把水从地下抽到蓄水池(在附近的山上),次日清晨,蓄水池的水再被送至灌溉系统。
$$
图1-3太阳 能收集器阵列
$$
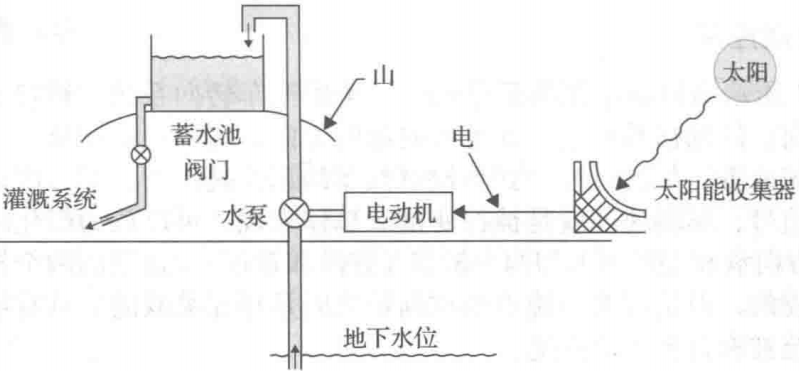 $$
图1-4使用太阳能的高效抽水机的概念图
$$
太阳能收集器的一个重要特征是蝶形收集器必须精确地跟踪太阳,因此,蝶形收集器的移动必须由复杂的控制系统控制。图1-5所示控制框图描绘了太阳跟踪系统及其他一些重要部件的常见结构。控制器在清晨发出“开始跟踪”命令并保证收集器始终对着太阳。控制器在白天不断计算两个控制轴(方位角和仰角)的移动速度,并使用这个速度与太阳传感器获得的信息作为输人来启动适当的电动机指令,从而转动收集器。
$$
图1-4使用太阳能的高效抽水机的概念图
$$
太阳能收集器的一个重要特征是蝶形收集器必须精确地跟踪太阳,因此,蝶形收集器的移动必须由复杂的控制系统控制。图1-5所示控制框图描绘了太阳跟踪系统及其他一些重要部件的常见结构。控制器在清晨发出“开始跟踪”命令并保证收集器始终对着太阳。控制器在白天不断计算两个控制轴(方位角和仰角)的移动速度,并使用这个速度与太阳传感器获得的信息作为输人来启动适当的电动机指令,从而转动收集器。
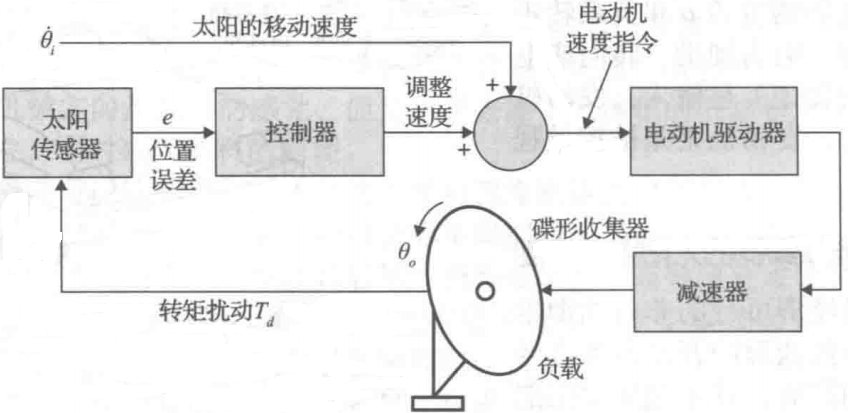 $$
图1-5太阳跟踪装置的重要部件
$$
$$
图1-5太阳跟踪装置的重要部件
$$