1.4节中显示的使用反馈的动因显得过于简单了。在那些例子里,反馈用于减少系统输出和参考输人之间的误差,但是反馈在控制系统中的意义远比上述例子所展示的深刻得多。减小系统误差只是反馈对于系统的各种重要作用之一。以下几节介绍反馈对于稳定性、带宽、总增益、阻抗和敏感度等系统品质特性的影响。
要理解反馈对系统的作用,就必须在广义上考察这种现象。如果反馈是为了实现控制而有意识地引入到系统中的,那么反馈的存在性是很容易识别的。但是,对于很多我们认为应该是不存在反馈的物理系统,却可以通过一定的方法观察到其中存在的反馈。一般地,只要系统变量中存在闭合的因果关系序列,系统就存在反馈。按这种观点看,很多通常被认为是无反馈的系统都存在反馈。不过,在控制理论中不管系统是否具有物理反馈,只要能够确定其具有前面提到的反馈,就可以用系统的方法加以研究。
现在来讨论一下反馈对系统各方面性能的影响。由于目前还不具备线性系统理论的数学基础,我们只讨论简单的静态系统。图1-9所示系统具有简单反馈,$r$代表输人信号,$y$代表输出信号,$e$是误差,$b$是反馈信号,参数$G$和$H$可以看作常量增益。由简单的代数运算很容易得到系统的输入输出关系:
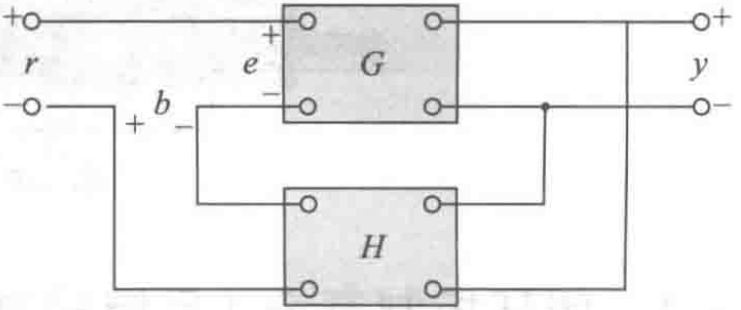 $$
图1-9 反馈系统
$$
$$
图1-9 反馈系统
$$
$$ M = \frac{y}{r}=\frac{G}{1+GH}\(1-1) $$ 根据反馈系统结构的基本关系,我们可以得到反馈的一些重要作用。
1.5.1 反馈对于总增益的影响
由式(1-1) 可以看出,反馈系统的增益中比无反馈系统的增益多了一个因子$1+GH$。图1-9所示的系统包含$负反馈$,因为反馈信号是负的。乘积$GH$自身可能是一个负信号,因此反馈的一般作用是它可以增加或减小增益G。在实际系统里,$G$和$H$是频率的函数,所以$1+GH$的幅值可能在某个频段大于1,而在另一个频段小于1。由此可知,反馈可以在一个频段增加系统增益,而在另一个频段减小系统增益。
1.5.2 反馈对于稳定性的影响
稳定性的概念用于描述系统能否跟随输人命令,也就是一般意义下的可用性。不严格地说,系统输出失去控制时就被称为不稳定。为了研究反馈对于稳定性的影响,我们仍然考虑式(1-1)。若$GH=-1$,则对于任意的有限输入,系统输出均为无穷,系统不稳定。这意味着反馈可以使原来稳定的系统变成不稳定。确实,反馈是一把双刃剑,使用不当也会有害。需要指出的是,这里讨论的只是静态情况,而且一般情况下$GH=-1$并非是使系统不稳定的唯一 条件。有关系统稳定性的内容将在第5章进行详细讨论。
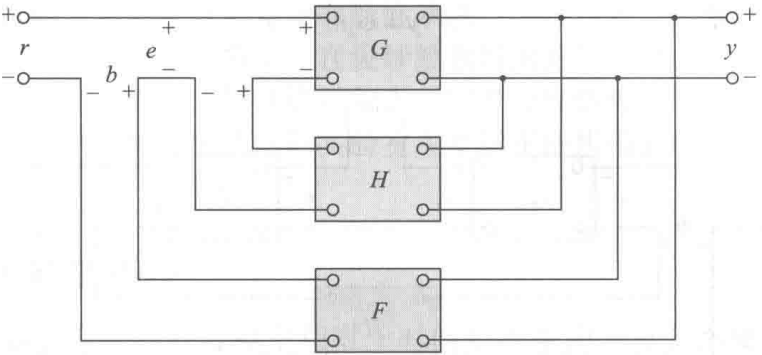 $$
图1-10具有两个反馈环的反馈系统
$$
反馈的好处之一在于可以使不稳定的系统变得稳定。假设图1-9所示系统不稳定,因为$GH=-1$ ;如果按照图1-10使用负反馈增益$F$引人另一个反馈环,整个系统的输人输出关系为
$$
\frac{y}{r}=\frac{G}{1+GH+GF}\(1-2)
$$
显然,尽管因为 $GH=-1$而使得反馈系统内环不稳定,但通过适当选择外环反馈增益$F$,仍旧可以使整个系统稳定。实际上,$GH$是频率的函数,闭环系统的稳定性条件依赖于$GH$的幅值和相位。
$$
图1-10具有两个反馈环的反馈系统
$$
反馈的好处之一在于可以使不稳定的系统变得稳定。假设图1-9所示系统不稳定,因为$GH=-1$ ;如果按照图1-10使用负反馈增益$F$引人另一个反馈环,整个系统的输人输出关系为
$$
\frac{y}{r}=\frac{G}{1+GH+GF}\(1-2)
$$
显然,尽管因为 $GH=-1$而使得反馈系统内环不稳定,但通过适当选择外环反馈增益$F$,仍旧可以使整个系统稳定。实际上,$GH$是频率的函数,闭环系统的稳定性条件依赖于$GH$的幅值和相位。概括来讲,反馈可以改善系统稳定性,也会因为不恰当的使用而损害系统稳定性。
敏感度也是设计控制系统时需要考虑的一个重要因素。由于所有的物理元件都具有随环境和使用时间而改变的性质,所以不能认为控制系统的参数在系统的使用寿命内是一成不变的。例如,电动机的绕线电阻在其运行时会随着温度升高而改变。带有电子元件的控制系统由于系统参数在“预热”的过程中仍在发生变化,在第一次启动时往往不能正常工作,这种现象有时被称为“早困”。大多数复印机在第一次运行的时候有一个“预热”的过程,在这段时间里不做控制操作。
一般而言,一个好的控制系统应该对参数变化不敏感,而对输人指令敏感。我们来看一下参数变化时反馈对敏感度的影响。考虑图1-9所示系统,我们认为 $G$ 是可能变化的增益参数。整个系统的增益 $M$ 对 $G$ 的变化的敏感度定义为 $$ S^M_G = \frac{\partial{M}/M}{\partial{G}/M}=\frac{M变化的百分比}{G变化的百分比}\(1-3) $$ 这里 $\partial{M}$ 表示 $G$ 的增量引起的 $M$ 的增量。使用式( 1-1 ),敏感度方程可以写成 $$ S^M_G = \frac{\partial{M}}{\partial{G}}\frac{G}{M}=\frac{1}{1+GH}\(1-4) $$ 上述关系式表明: 如果 $GH$ 是正常数,可以在系统保持稳定的情况下,通过增加 $GH$ 来减小敏感度函数的幅值。显然在开环系统里,系统增益与 $G$ 的变化是一一对应的(如 $S^M_G=1$ )。如前所述,$GH$ 是频率的函数; $1+GH$ 的幅值在某些频段内可能小于1,因此反馈可能在某些情况下增大系统对参数变化的敏感度。一般地,反馈系统增益对于参数变化的敏感度取决于参数所在的位置。读者可以推导出图1-9的系统对于H的变化的敏感度。
1.5.3 反馈对于外部干扰或噪声的作用
所有的物理系统在运行时都会受到外部信号或噪声的影响。此类信号包括电路中的热噪电压和电动机电刷或转向器噪声等。外部干扰,例如作用在天线上的阵风等,在控制系统中也很常见。因此,控制系统应当对噪声和干扰不敏感,而对输入指令敏感。
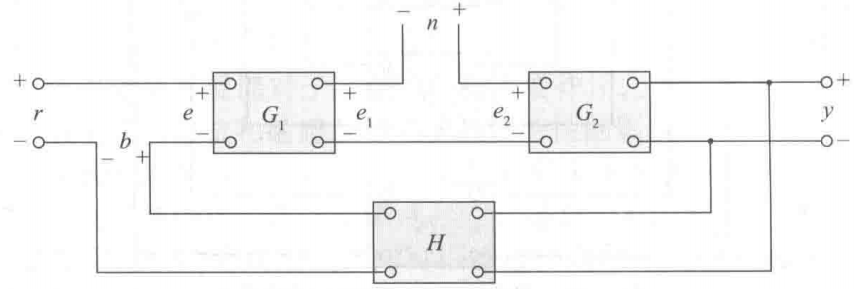 $$
图1-11有噪声信号的反馈系统
$$
反馈对于噪声和干扰的作用很大程度上取决于这类外加信号在系统中施加的位置。尽管没有一般性的结论,但是多数情况下
$$
图1-11有噪声信号的反馈系统
$$
反馈对于噪声和干扰的作用很大程度上取决于这类外加信号在系统中施加的位置。尽管没有一般性的结论,但是多数情况下反馈可以减小噪声和干扰对系统性能的影响。考察图1-11所示系统,$r$表示指令信号,$n$表示噪声信号。在没有反馈的情况下,$H=0$,$n$单独作用所产生的输出y为
$$
y = G_2n\(1-5)
$$
有反馈的情况下,$n$ 单独作用所产生的系统输出为
$$
y = \frac{G_2}{1+G_1G_2H}\(1-6)
$$
比较式(1-6)与式(1-5)可以看出,当 $1+G_1G_2H$ 大于1并且系统保持稳定时,包含在输出中的噪声被削弱了。
第11章里将使用前馈与前向控制器配置与反馈配合来减小扰动和噪声的影响。一般来说,反馈对于带宽、阻抗、暂态响应、频率响应等性能特点也都有影响,这些影响将在后续章节中讨论。