我们将利用在前述章节中介绍的所有基础知识和分析方法来实现控制系统设计这一最终目标。以图11-1所示控制框图表示的受控过程为例,控制系统设计主要涉及以下3个步骤:
- 确定系统应该做什么以及如何做(设计要求)。
- 根据控制器或校正器在受控系统中的连接方式,确定其结构配置。
- 确定控制器的参数,使得系统达到设计目标。我们将在下面几节详细介绍控制系统的设计。
11.1.1 设计要求
正如第7章所讨论的,我们使用设计要求来描述给定输入系统的预期性能。根据不同的应用,设计要求也不尽相同,但通常包括相对稳定性、稳态精度(误差)、瞬态响应和频率响应等特性。在一些特殊的应用中,在系统设计时也会考虑对参数变化的灵敏性,即鲁棒性或抗干扰性。
线性控制系统的设计既可以使用时域方法也可以采用频域方法。例如,稳态精度可以通过阶跃响应、斜坡响应或抛物线响应的方法来实现,而且用时域方法可以使系统更为方便地达到设计要求。对于其他的要求,例如单位阶跃下的最大超调、上升时间和调节时间也都适用于时域设计。而对于增益裕量、相位裕量和谐振峰值 $M$,,这些衡量相对稳定性的频域特性,通常由Bode图、极坐标图、相位-增益图和 Nichols图来表示,再运用图解法进行研究。
对于二阶系统,时域性能指标和频域性能指标之间有明确的对应关系,但对于高阶系统而言,这种时域指标和频域指标之间的关系就难以建立。值得一提的是,对控制系统的分析和设计是一个需要经验性的工作。对于同一个问题,设计者可以从诸多方法中选取合适的一个来进行设计。
因此,设计者可以根据个人喜好在时域方法或频域方法中选择一种最合适的方法来进行控制系统的设计。需要注意的是,在绝大多数情况下,时域指标(例如最大超调、上升时间和调节时间)通常作为系统性能的最终衡量标准。对于一个没有经验的设计者而言,很难理解诸如增益裕量、相位裕量和谐振峰值等频域特性和实际控制系统之间的物理联系。例如,20dB 的增益裕量是否能保证最大超调小于10%?又比如说,人们很容易理解控制系统的最大超调应该小于5%,调节时间应该小于0.01s这类指标,但相位裕量应该为60°、M,应小于1.1这类频域指标与系统性能之间的关系却并不直观。以下几点详细解释了如何选择使用时域或频域特性指标以及选用这些指标的原因。
- 以往,在设计线性控制系统时,会采用大量的基于频域的图形工具,例如 Bode图、Nyquist图、增益–相位图和Nichols图等。这些图的优点是:它们不是由精确的点绘制而成的,而是用近似的方法画的。根据图表,设计者可以得到控制系统的增益裕量、相位裕量和M,等频域特性,然后再根据频域方法进行设计。这样使得设计高阶控制系统也不会特别困难。某些类型的控制器在频域中有现成的设计方法,从而可以最大限度地避免反复试验。
- 时域中的设计主要使用诸如上升时间、延迟时间、调节时间和最大超调等性能指标,但这些分析只适用于二阶系统或可以近似成二阶系统的高阶系统。对于一般高于二阶的控制系统,在时域中就很难遵循一般的设计步骤。
随着高性能、易操作的计算机软件(例如MATLAB)的迅速发展和广泛应用,控制系统的设计也发生了巨大的变化。借助MATLAB,设计者可以在几分钟内完成大量的时域性能指标的设计。这种基于手动执行图形设计的便利性大大降低了频域设计以往的优势。
在本章中,我们结合小型 MATLAB工具箱来帮助你理解示例。在本章结尾将介绍MATLAB SISO设计工具,该工具将有助你更好地使用根轨迹和频域方法。
通常来说,选取一组有意义的频域指标使得对应时域性能指标满足要求是很困难的(有经验的设计者除外)。例如,除非我们知道性能指标要求相位裕量为60°所对应的最大超调,否则该频域指标将是无意义的。事实证明,为了控制最大超调,通常必须至少指定相位裕量或M,。最终,建立一组频域特性变成了一个反复试错的过程。然而,频域方法在解决抗噪和系统灵敏度性能的问题上还是很有用的。更重要的是,频域方法为系统设计提供了另外―种选择。因此,为了方便地比较时域设计和频域设计这两种方法的特点,本章将同时介绍这两种设计方法。
11.1.2控制器结构
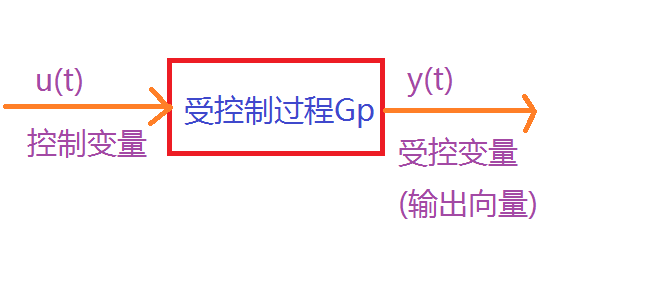
通常来说,线性受控过程的动态行为可以用图11-1所示控制框图表示。控制系统的设计目标是在一定的时间间隔内通过控制输入信号u(t)使得输出向量y(t)表示的受控变量满足期望要求。
 控制系统中的大多数常规设计方法依赖于所谓的固定结构设计: 设计者一开始就决定了整个设计系统的基本结构,以及控制器相对于受控过程的位置。然后设计问题变成控制器元件的设计。由于大多数控制行为涉及对系统性能特征的修正或校正,所以一般使用固定结构的设计也称为校正。
控制系统中的大多数常规设计方法依赖于所谓的固定结构设计: 设计者一开始就决定了整个设计系统的基本结构,以及控制器相对于受控过程的位置。然后设计问题变成控制器元件的设计。由于大多数控制行为涉及对系统性能特征的修正或校正,所以一般使用固定结构的设计也称为校正。
 $$
a)串联(级联)校正
$$
$$
a)串联(级联)校正
$$
 $$
b)反馈校正
$$
$$
b)反馈校正
$$
 $$
c)状态反馈校正
$$
$$
c)状态反馈校正
$$
 $$
d)串联反馈校正(带二阶自由度)
$$
$$
d)串联反馈校正(带二阶自由度)
$$
 $$
e)带有串联校正的前向校正(带二阶自由度)
$$
$$
e)带有串联校正的前向校正(带二阶自由度)
$$
 $$
f)前馈矫正(带二阶自由度)
$$
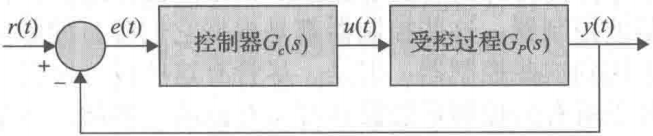
几个常用的带有校正控制器的控制系统结构如图11-2所示。简单描述如下:
$$
f)前馈矫正(带二阶自由度)
$$
几个常用的带有校正控制器的控制系统结构如图11-2所示。简单描述如下:
- 串联(级联)校正。图11-2a展示了一种最为常用的系统控制结构:在受控过程中串联一个控制器,这种结构被称为串联或级联校正。
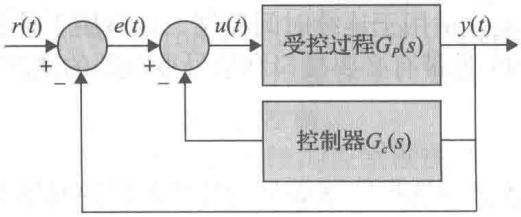
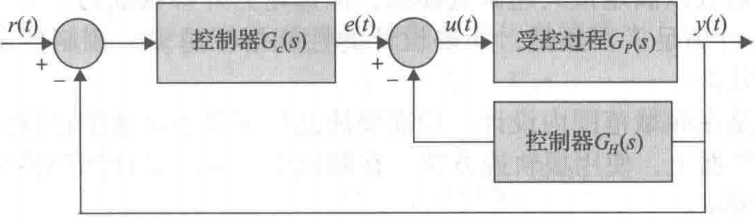
- 反馈校正。如图11-2b所示,这种将控制器放在负反馈回路中的设计称为反馈校正。
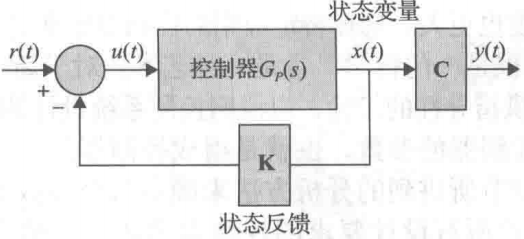
- 状态反馈校正。系统的状态变量经定常增益得到控制信号,这被称为状态反馈,如图11-2c所示。状态反馈的缺点是,对高阶系统来说,状态变量较多,为了进行状态反馈就需要较多的传感器来检测状态变量,这样在实际应用时造价高且不可行。即使对于低阶系统,并不是所有的变量都可以直接可测,因此可能需要用观测器或估计器根据测得的输出变量来估计状态变量。
- 串联反馈校正。图11-2d是由一个串联控制器和一个反馈控制器组成的串联反馈校正。
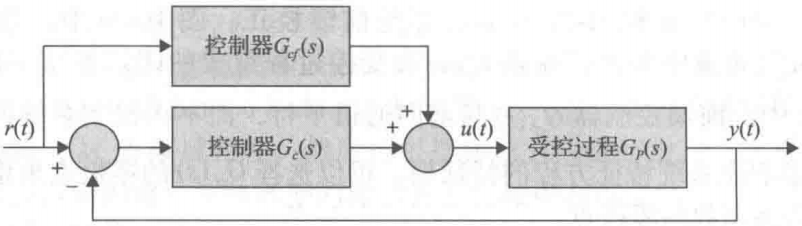
- 前馈校正。图 11-2e 和 11-2f 所示的都是
前馈校正。图10-2e中,前馈控制器 $G_{cf}(s)$ 在前向通道中与由控制器 $G_c(s)$ 和受控过程组成的闭环系统串联在一起。在图11-2f中,前馈控制器 $G_{cf}(s)$ 与前向通道平行,而不在控制系统回路中,这样就不会影响原系统特征方程的特征根。可以选择 $G_{cf}(s)$ 的零极点来增加或抵消系统闭环传递函数的零极点。
图11-2a~c所示的系统中即使有的控制器中有多个可变参数,但每个控制系统中都只有一个控制器,因此都属于一阶自由度校正。用一阶自由度控制器来实现性能指标有一定的局限性。例如,如果系统要满足一定的稳定性,那么对参数变化就要不敏感;或者,如果选择特征方程的特征根来提供一定的相对阻尼,由于闭环传递函数存在零点,系统阶跃响应的最大超调量仍可能过大。图11-2d~f给出了带有二阶自由度的校正设计。
PID控制器是校正设计中一种常用的控制器,在PID控制中,受控信号经过比例控制、积分控制和微分控制。因为这些信号在时域容易实现而且也容易观察,所以一般用时域方法进行设计。除了PID控制器,比较常用的控制器还有超前控制器、滞后控制器、超前–滞后控制器以及陷波控制器。这些控制器都是根据它们各自的频域特性来命名的,因此经常在频域设计中用到这些控制器。但是,尽管有这些设计倾向,从时域和频域两方面来分析设计结果对于所有的控制系统设计都是有益的。因此,本章会广泛使用时域和频域这两种方法。
需要指出的是,绝不仅仅只有这几种校正方法。我们将在本章后几节中详细介绍这些校正设计方法。图11-2表示的系统结构不仅适用于连续时间控制,也适用于控制器是数字的(在这种情况下,控制器必须是数字的)且带有必要接口和信号变换器的离散时间控制。
11.1.3设计的基本原则
当一个控制器结构确定后,设计者还必须选择能够满足设计要求的控制器类型以及元件参数。对于同一个控制系统设计要求,设计者可以设计出各种控制器类型。在工程实际应用中人们一般选择能够满足设计要求的最简单的控制器。大多数情况下,控制器越复杂其造价也就越高,可靠性也就越差,设计难度也更大。选择特定应用的控制器经常是基于设计者的经验和直觉的。这使得控制器设计不仅是一门科学,也是一种艺术。对于新手来说,开始很难选择一个合适的控制。本章会提供指导性的经验,以说明控制系统设计的基本要素。
选择好控制器,下一步就是选择控制器的参数,也就是组成控制器的一个或多个传递函数的系数。基本的方法是用前面章节所讲到的分析方法来确定每个参数对于设计要求和系统特性的影响,并进而确定满足所有设计要求的控制器参数。这种方法虽然简单,但通常情况下控制器参数会互相影响,使得设计要求相互矛盾,造成设计上的重复。例如,选定一个参数以满足最大超调量要求,但选定另外参数满足上升时间时,最大超调特性可能就不再满足了。显然,所要设计的性能指标越多,控制器参数也就越多,设计过程也就越复杂。
无论是在时域还是在频域范围内设计,均需要注意以下几条基本的设计法则。在时域中,设计通常在s平面上,使用根轨迹方法。在频域中,通过设计回路传递函数的增益和相位来达到设计要求。 一般而言,总结时域和频域的特征是很有用的,这样它们可作为设计指导方针:
- 闭环极点为复共栀极点,系统为欠阻尼系统,单位阶跃响应为阻尼振荡过程;闭环极点都是实数,阶跃响应为过阻尼状态。但即使系统过阻尼,闭环系统的零点也可能导致系统超调。
- 系统的动态性能基本上由s平面上接近原点的闭环极点决定,闭环极点越靠左,时间响应分量的下降速度越快。
- 对系统动态性能起主要作用的闭环极点称为主导极点,系统的主导极点在s平面上越靠左,系统的响应就越快,带宽也越大。
- 在s平面上主导极点越靠左,在实际应用中实现这样的系统的造价就越高,系统的内部信号也越大。就像我们用锤子砸钉子,锤子冲击钉子的速度越快,砸钉子的力量就越大,所要消耗的能量也越大;同样,跑车比一般汽车速度快,它所耗费的油也多。
- 当控制系统传递函数的一对零极点近似可抵消时,这个极点产生的那部分系统响应会有小的幅值。
- 控制系统的时域特性和频域特性之间有一定的对应关系:上升时间和带宽是反比关系,增大相位裕量和增益裕量,减小M,值可以改善系统的衰减性。