从前面的讨论知道, PD 控制器能够增加系统的阻尼但不改变稳态响应。PI控制器可以同时改进系统的相对稳定性和稳态误差,但增加了,上升时间。使用 PID 控制器就是为了利用PI控制器和 PD 控制器各自的优点。下面将要简单介绍一-下设计 PID 控制器的步骤:
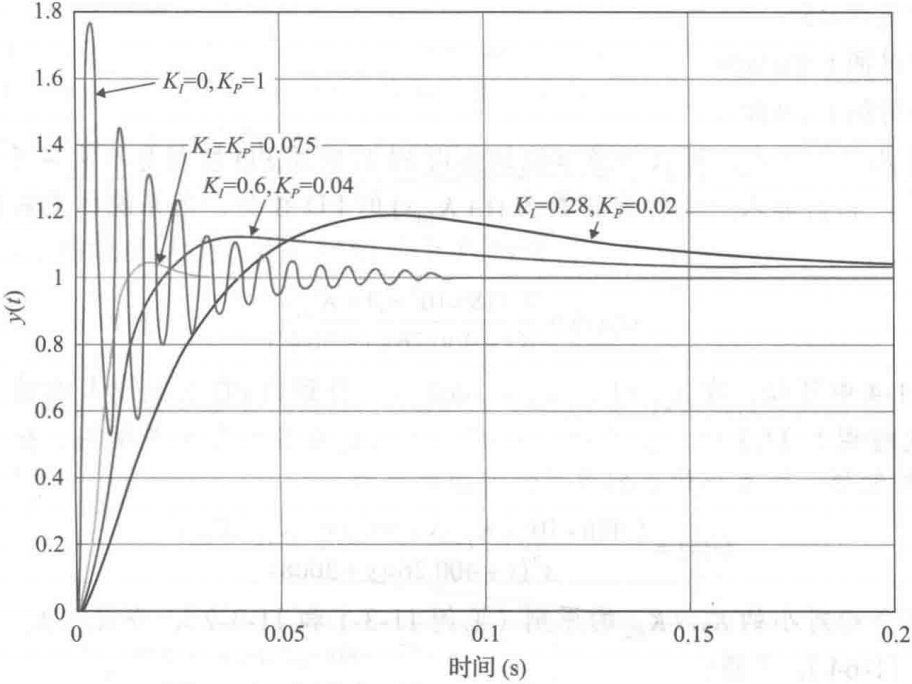 $$
图11-27 例11-3-2中具有Pl控制器的控制系统的单位阶跃响应曲线
$$
1.考虑有这么一个 PID 控制器,它由PI控制器串联上一个 PD 控制器组成。那么该 PID 控制器的传递函数可以写为
$$
G_c(s) =K_P+ K_DS+\frac{K_I}{S}=(K_{P1}+K_{D1}S)(K_{P2}+\frac{K_{I2}}{S})\(11-58)
$$
将 PD 控制器的比例常数设定为Kp=1,因此我们只需要设计 PID 中的3个参数。令式(11-58)左右两边同类项的系数相等,可以得到:
$$
(11-59)K_P = K_{P2}+K_{D1}K_{I2}\\
\
(11-60)K_D=K_{D1}K_{P2}\\
\
(11-61)K_I = K_{I2}
$$
2. 考虑只有 PD 部分有效。选择$K_{D1}$的值使得部分期望的相对稳定性可以实现。在时域中,系统的相对稳定性可以表示为最大超调量;在频域中,相对稳定性可以通过相位裕量来描述。
3. 选择参数 $K_{I2}$ 和 $K_{P2}$ 使得系统的相对稳定性完全满足要求。
$$
图11-27 例11-3-2中具有Pl控制器的控制系统的单位阶跃响应曲线
$$
1.考虑有这么一个 PID 控制器,它由PI控制器串联上一个 PD 控制器组成。那么该 PID 控制器的传递函数可以写为
$$
G_c(s) =K_P+ K_DS+\frac{K_I}{S}=(K_{P1}+K_{D1}S)(K_{P2}+\frac{K_{I2}}{S})\(11-58)
$$
将 PD 控制器的比例常数设定为Kp=1,因此我们只需要设计 PID 中的3个参数。令式(11-58)左右两边同类项的系数相等,可以得到:
$$
(11-59)K_P = K_{P2}+K_{D1}K_{I2}\\
\
(11-60)K_D=K_{D1}K_{P2}\\
\
(11-61)K_I = K_{I2}
$$
2. 考虑只有 PD 部分有效。选择$K_{D1}$的值使得部分期望的相对稳定性可以实现。在时域中,系统的相对稳定性可以表示为最大超调量;在频域中,相对稳定性可以通过相位裕量来描述。
3. 选择参数 $K_{I2}$ 和 $K_{P2}$ 使得系统的相对稳定性完全满足要求。
注意,设定$K_{p1}$=1的步骤和例11-2-1和11-2-2中的 PD 控制器设计是一致的。下面的例子将用于说明如何在时域和频域中设计 PID 控制器。